
Mechatronics
UCSC Mechatronics Course Final Project
Fully Autonomous Obstacle Couse Navigating Robot
UCSC Mechatronics Course Final Project
Fully Autonomous Obstacle Couse Navigating Robot
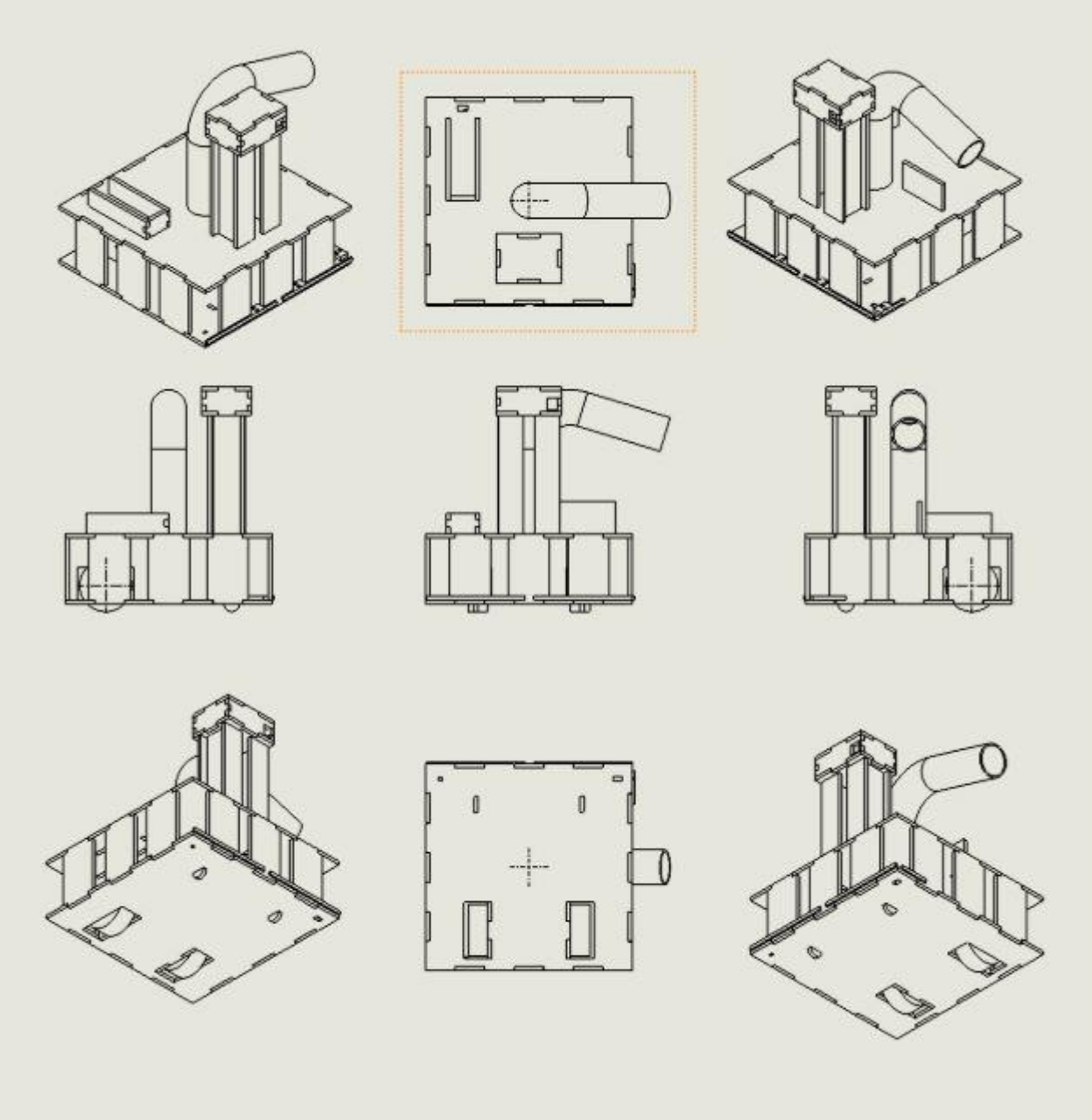
Two fellow students and I created a fully autonomous robot capable of navigating unstructured and dynamic environments to transport and sort items to their appropriate containers. The robot used a combination of pressure, electromagnetic, infrared and proximity sensors to navigate its environment safely. We created the circuitry and embedded software to properly receive, analyze and react appropriately. The robot navigates through the use of integrated rear mounted motors for optimal traction based upon the mechanical design. A third integrated motor controls the elevator mechanism responsible for loading and unloading objects. All mechanical components were 3D modeled and simulated in Solidworks before being lasercut and fastened together. Behavior is coded in C++ through the use of a hierarchical state machine and ran on an arduino microcontroller. We treated this project as if it were early stage product development for a startup. Worked tirelessly to deliver a great project quickly and efficiently. This was possible due to thorough test plans at small milestones to ensure quick and efficient debugging of hardware, software and mechanical aspects as well as quantitatively assess performance of these individual components.
Feel free to contact me anytime using any of the methods below.