Soft Robotic Jellyfish
UCSC Bio Inspired Locomotion Final Project
Conceptualization & Simulated Prototyping
UCSC Bio Inspired Locomotion Final Project
Conceptualization & Simulated Prototyping
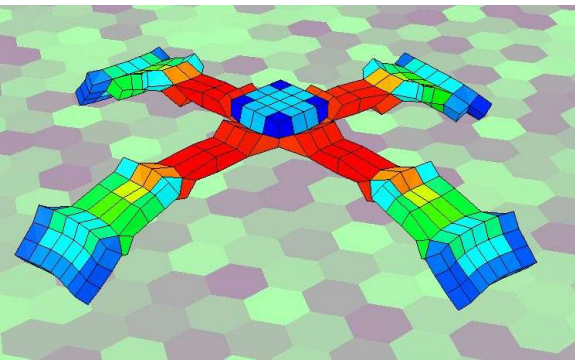
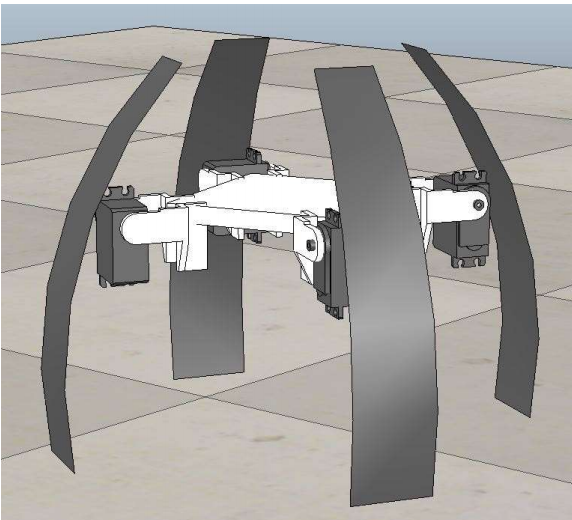
This paper takes inspiration from a jellyfish bell in order to create a battery powered and autonomous bio-inspired soft robot. A jellyfish was chosen due to its combination of speed and efficiency. This is due to the natural aerodynamics of the jellyfish as well as their use of a toroidal vortex. In addition to the swimming characteristics of a jellyfish, the animal is also naturally soft and flexible allowing for an easy translation of the jellyfish kinematics to soft robot. A soft robot was chosen because the final intention of this robot is to aid marine researchers in their studies of fragile ecosystems such as coral reefs.
Feel free to contact me anytime using any of the methods below.